
News
11/06/2026
by Kvaser
How Chalmers Formula Student builds autonomous race cars with Kvaser
Every year, students at Chalmers University of Technology design and build a brand-new Formula Student race car from scratch. The project combines electric drivetrains, autonomous systems, and hands-on engineering in one of Scandinavia’s most advanced student engineering programs.
Their latest car, Astrid, continues a tradition that began in 2003 and has evolved from combustion engines to electric and autonomous racing platforms.
To develop and validate the vehicle’s communication systems, the team relies on Kvaser CAN interfaces throughout the development process.
During our visit, we met with Hugo Morau, Oskar Lind, Andreas Åberg and Anton Rosvall from Chalmers Formula Student to learn more about the team’s development workflow, autonomous systems, and engineering challenges.
Building a new race car every year

Chalmers Formula Student consists of around 60 students from disciplines including mechanical engineering, embedded systems, software engineering, and autonomous systems. The team is organized into specialized groups that develop everything from ECUs and battery systems to autonomous perception and control software.
Every season, the team builds a completely new race car. Students spend approximately six months working nearly full time on the project alongside their studies, and some receive academic credits through their master’s programs.
Since transitioning to electric vehicles in 2015, Chalmers Formula Student has established itself as one of Scandinavia’s strongest Student teams in autonomous racing. Their 2025 car, Svea, won the Driverless Cup at Formula Student Germany.
At the time of our visit, the team was preparing Astrid for its first track tests ahead of the 2026 competition season.

Managing real-time communication in an autonomous race car
Modern Formula Student vehicles depend on fast and reliable communication between distributed systems. Astrid uses four separate CAN buses to manage systems such as steering, actuators, and the main vehicle network.
The team uses Ethernet specifically for LiDAR and telemetry, while the vehicle’s control systems remain CAN-based. CAN and Ethernet operate as separate systems, with CAN data broadcast through ROS 2 for telemetry purposes. The 100 Hz control system communicates entirely over CAN, including communication with inverter systems, the IMU, steering motor, and other critical vehicles functions.
Autonomous racing pushes both computing performance and communication reliability to their limits. The team explained that their platform operates under tight CPU limitations, where every processing decision matters. If the system loses its LiDAR point cloud – a real-time 3D map built from millions of measured distance points – the vehicle enters emergency mode and brakes automatically. Anton Rosvall explains:
“If we lose a point cloud, the car will hit the brakes”.
In a 200 kg autonomous race car, stable software and reliable communication, and fast diagnostics are critical on both the test track and the race track.
Using Kvaser interfaces throughout development
The team uses Kvaser Leaf v3, Kvaser BlackBird v2, Kvaser T-Cannector v2, and Kvaser M.2 PCIe 4xCAN cards across its embedded and vehicle development workflows.
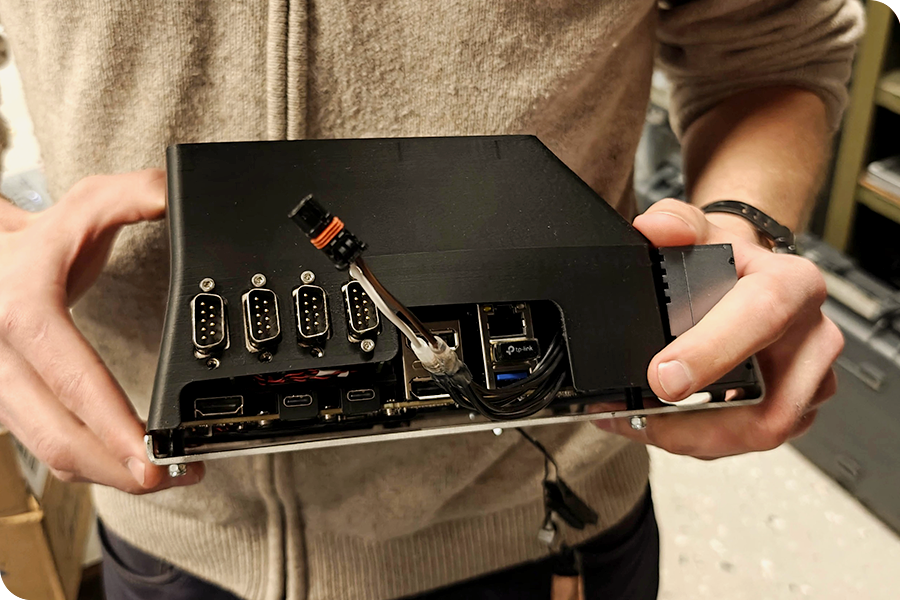
Kvaser hardware supports ECU diagnostics, embedded debugging, CAN logging, communication testing and system flashing.
Introduced during the 2025 season, the Kvaser M.2 interface cards are integrated directly into the onboard computers in the team’s latest vehicle platform.
“The M.2 cards just work every time” says Anton Rosvall.
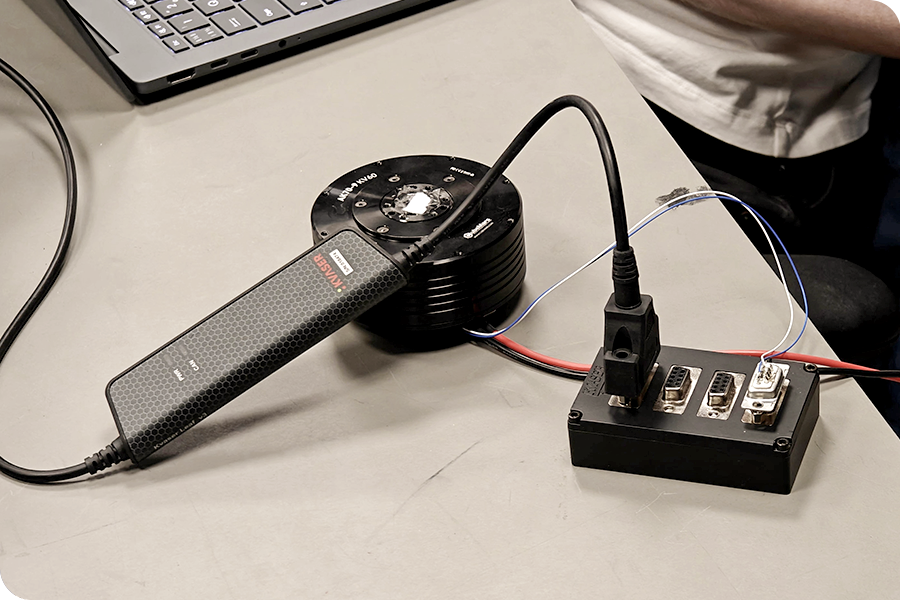
The team also uses Kvaser interfaces to flash and communicate with computer nodes throughout the vehicle.
Compared to other CAN interfaces they previously used, Anton Rosvall highlighted the simplicity of connecting through USB and flashing systems directly over CAN.
“With Kvaser we can simply connect through USB and flash CAN directly, which had been a problem with other CAN interfaces”.
Solving critical issues at the track
In Formula Student, quick troubleshooting can decide whether a team finishes the race weekend or retires early.
During the 2024 season, the team encountered a battery-related issue during competition that threatened to stop the car from running. Using Kvaser CAN interfaces, they were able to flash the vehicle systems over CAN, identify the issue, and restore functionality in time to continue competing.
The incident highlighted how important reliable communication tools become when problems need to be solved quickly under race conditions.
Logging and analyzing vehicle data
Autonomous systems generate large amounts of data during testing and competition. To monitor vehicle behavior and system performance, the team combines tools including Foxglove, ROS 2, SocketCAN, and SavvyCAN. Each tool handles different parts of the software stack, from CAN communication and telemetry to sensor data and system visualization.
The team uses Foxglove Bridge to stream live vehicle data during testing, making it easier to monitor systems and analyze behavior in real time.
Ongoing work focuses on challenges related to CAN load, software debugging and logging performance. Another area of interest is rolling logging functionality, allowing the system to continuously store the most recent vehicle data for faster fault analysis.
Preparing the next generation of engineers
Chalmers Formula Student gives students hands-on experience with systems integration, embedded software, autonomous vehicle development, and real-time communication.
For Kvaser, the collaboration demonstrates how reliable CAN interfaces support innovation from student engineering projects to advanced vehicle platforms.
As Astrid prepares for the upcoming Formula Student competitions, Chalmers Formula Student continues pushing the boundaries of electric and autonomous racing.

Read more about Chalmers Formula Racing’s success and their project.
Explore Kvaser products in this case study

Kvaser Leaf v3
The Kvaser Leaf v3 represents one of the easiest and lowest-cost methods of connecting a computer to a CAN bus network in order to monitor and transmit CAN and CAN FD data.
Visit product
Kvaser M.2 PCIe xCAN
Kvaser M.2 PCIe xCAN delivers ultra-compact, high-speed CAN/CAN FD connectivity with exceptional flexibility for advanced embedded systems.
Visit product
Kvaser BlackBird v2
Kvaser BlackBird v2 is a high performance wireless (WLAN) communication link for the High Speed CAN bus.
Visit product
Kvaser T-Cannector v2
Kvaser T-cannector v2 is a CAN bus hub with three sockets and one plug D-SUB9 connectors.
Visit product