Robotics
As the most widely used bus architecture in automotive design, the Controller Area Network (CAN) is suited to any control system where a network architecture is needed, as opposed to a traditional system with a central processor. Like cars, robots typically combine an array of sensors and actuators connected in a decentralised architecture with multiple processing units. CAN vastly simplifies the wiring harness in this kind of system, which is why it has long played a special role in the robotics industry.
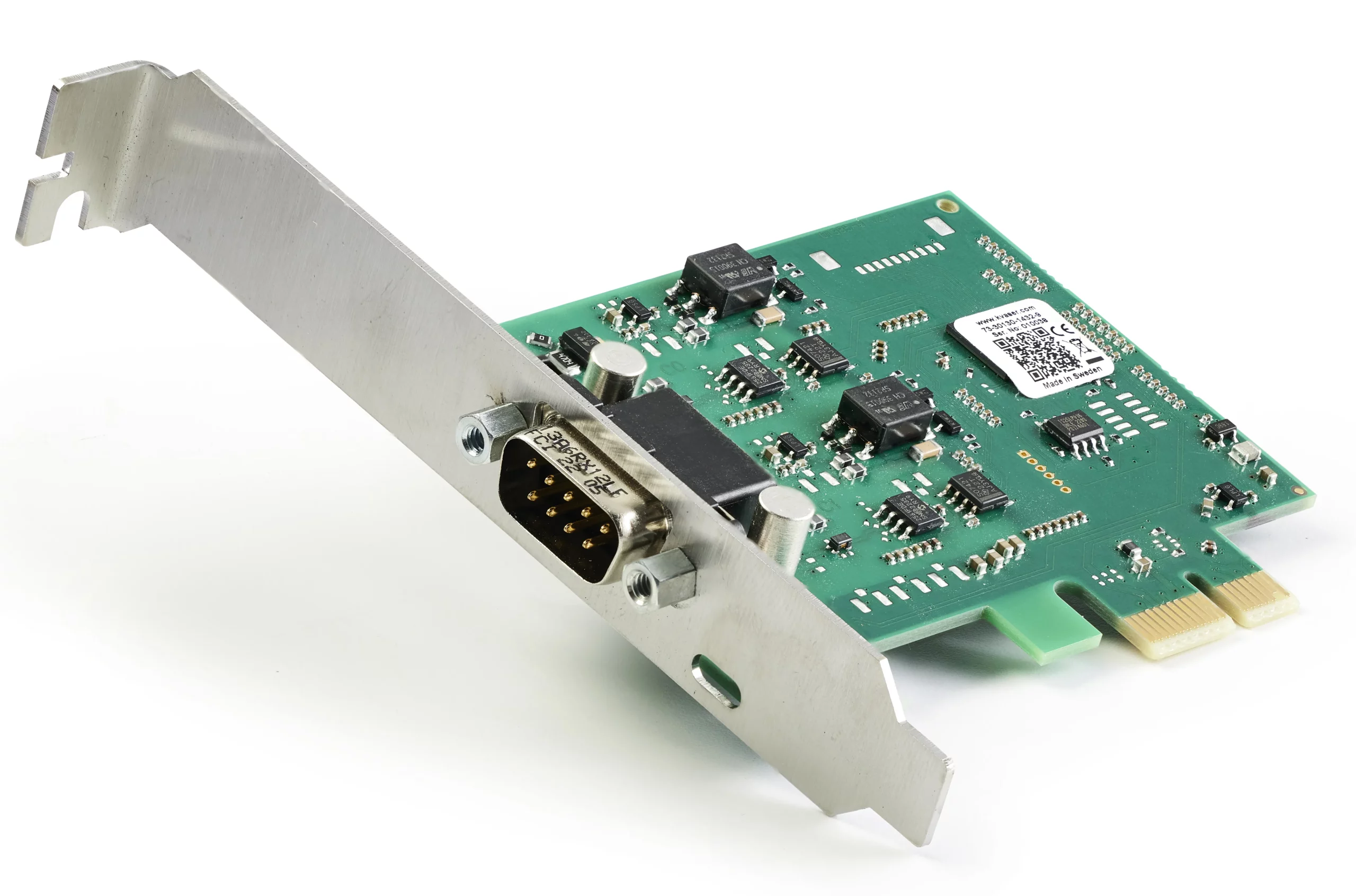
Of-course, CAN only defines the physical and data-link layer protocols, so a higher-level protocol (HLP) is needed to manage communication within a system. CANopen or MicroCANopen are both used in robotics applications. All Kvaser’s CAN interfaces are compatible with both of these HLPs. Look out for our range of highly integrated CAN add-on boards, which suit many embedded systems.
Related Articles